

Μια ιδιαίτερη κατηγορία για τους λάτρεις του είδους.
Η κατηγορία Mimi Sumo θα διεξαχθεί σε μια ενιαία ηλικιακή κατηγορία.
ΚΑΝΟΝΕΣ
1 Εισαγωγή
Το παρόν έγγραφο ορίζει τους κανόνες για τα ρομπότ Mini Sumo. Οι κανόνες βασίζονται στους Baltic Robot Sumo Rules.
2 Κατηγορίες ρομπότ
Στον διαγωνισμό Sumo του Robotex εκπροσωπούνται μόνο αυτόνομα ρομπότ στην ακόλουθη κατηγορία:
-
Mini Sumo
3 Ο Διαγωνισμός
3.1 Ορισμός
Ένας χειριστής και τέσσερις βοηθοί μπορούν να εγγραφούν για κάθε ρομπότ (σύνολο 5 μέλη ομάδας). Ωστόσο, μόνο ο χειριστής επιτρέπεται να καθοδηγεί το ρομπότ. Όλοι οι διαγωνιζόμενοι πρέπει να τηρούν τους κανόνες του διαγωνισμού, τους όρους και τις προϋποθέσεις νίκης και να συμμετέχουν χρησιμοποιώντας αποκλειστικά αυτοσχέδια αυτόνομα ρομπότ στον προκαθορισμένο χώρο Dohyo. Ο νικητής ανακοινώνεται από τους κριτές.
3.2 Μορφή
Η μορφή του διαγωνισμού καθορίζεται από τους διοργανωτές, ανάλογα με τον αριθμό συμμετεχόντων. Αν οι συμμετοχές είναι πολλές, χρησιμοποιούνται υπο‑ομάδες για να καθοριστεί ποιος θα εισέλθει στο τελικό τουρνουά. Οι τελικοί διεξάγονται με σύστημα διπλού αποκλεισμού. Αν οι συμμετοχές είναι λίγες, όλοι οι διαγωνιζόμενοι αγωνίζονται απευθείας στο τελικό τουρνουά.
3.3 Υπο‑κατηγορίες
Οι αγώνες Mini Sumo του Robotex διεξάγονται σε μία και μοναδική ηλικιακή κατηγορία.
4 Dohyo Jyonai
Το Dohyo Jyonai (περιοχή αγωνιστικού δακτυλίου) αποτελείται από το Dohyo (αγωνιστικός κύκλος) και το Yochi (εξωτερική ζώνη του Dohyo). Ο υπόλοιπος χώρος θεωρείται Dohyo Jyogai (εκτός Dohyo).
Ο αγωνιστικός κύκλος είναι ένας κύκλος καλυμμένος με μαύρη επίστρωση
Πίνακας 1 – Παράμετροι πεδίων Sumo
Κατηγορία Ύψος Διάμετρος Υλικό επιφάνειας
Mini Sumo 1 – 5 cm77 cm ξύλο / πλαστικό
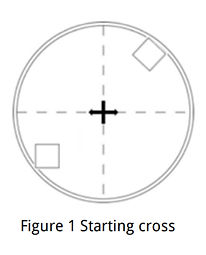
4.1 Σταυρός εκκίνησης
Ο σταυρός εκκίνησης τοποθετείται στο κέντρο του πεδίου Sumo και χωρίζει το πεδίο σε τέσσερις ίσους τομείς. Τα ρομπότ πρέπει να βρίσκονται σε δύο αντιδιαμετρικούς τομείς (βλ. Σχήμα 1). Το ρομπότ πρέπει να καλύπτει τουλάχιστον μερικώς την περιοχή Tawara (λευκή γραμμή). Ο διαιτητής αφαιρεί τον σταυρό εκκίνησης μόλις τοποθετηθούν τα ρομπότ.
Το ρομπότ δεν μπορεί να μετακινηθεί μετά την τοποθέτησή του στο πεδίο.
4.2 Tawara (λευκή γραμμή)
Το Tawara είναι η λευκή γραμμή γύρω από το Dohyo και αποτελεί τμήμα του Dohyo.
Πίνακας 2 – Διαστάσεις Tawara
Κατηγορία Πλάτος Tawara
Mini Sumo 2,5 cm
4.3 Yochi
Το Yochi είναι περιοχή γύρω από το Dohyo με διάμετρο τουλάχιστον 100 cm για Mini Sumo. Το χρώμα και το υλικό του Yochi μπορούν να επιλεγούν ελεύθερα, εκτός του λευκού.
Σχήμα 1 – Σταυρός εκκίνησης
5 Το Ρομπότ
5.1 Απαιτήσεις
5.1.1 Περιορισμοί διαστάσεων και βάρους
Πίνακας 3 – Περιορισμοί
Κατηγορία Μάζα Μήκος *Πλάτος *Ύψος
Mini Sumo 0,5 kg 10 cm 10 cm απεριόριστο
* Σημ.: Το Start Module πρέπει να τοποθετείται στο υψηλότερο σημείο του ρομπότ, όχι στο πλάι ούτε κάτω από το ρομπότ.
* Το ρομπότ μπορεί να επεκταθεί μετά την έναρξη του γύρου, αλλά πρέπει να παραμένει ενιαίο.
5.1.2 Αυτόνομα ρομπότ – εκκίνηση κινήσεων
Πίνακας 4 – Εκκίνηση
Κατηγορία Μέθοδος εκκίνησης
Mini Sumo Επίσημο υπέρυθρο τηλεχειριστήριο υπό τον έλεγχο του διαιτητή (βλ. Παράρτημα 2).
5.1.3 Αυτόνομα ρομπότ – διακοπή κινήσεων
Πίνακας 5 – Διακοπή
Κατηγορία Μέθοδος διακοπής
Mini Sumo Ο διαιτητής σταματά τα ρομπότ με το επίσημο υπέρυθρο τηλεχειριστήριο. Επιπλέον, οι χειριστές μπορούν να χρησιμοποιούν τα τηλεχειριστήριά τους για διακοπή.
5.1.4 Απαιτήσεις για τη χρήση λεπίδων
• Η χρήση διπλών λεπίδων δεν απαγορεύεται.
• Απαγορεύεται η χρήση εξαρτημάτων που μπορεί να αποκολληθούν κατά την κίνηση ή την επαφή με άλλο ρομπότ.
• Για ρομπότ Mini Sumo, όλες οι ακμές (συμπεριλαμβανομένης της μπροστινής κουτάλας) δεν πρέπει να είναι τόσο αιχμηρές ώστε να προκαλούν ζημιά στο δακτύλιο, σε άλλα ρομπότ ή σε παίκτες (εξαίρεση: σύγκρουση ρομπότ).
5.2 Κινήσεις αυτόνομων ρομπότ
Οι κινήσεις πρέπει να έχουν σχεδιαστεί ώστε να ανιχνεύουν τον αντίπαλο και να αντιδρούν/επιτίθενται ανάλογα. Σε περίπτωση αμφιβολίας για την αυτονομία, οι κριτές μπορούν να επιθεωρήσουν τη λογική ελέγχου του ρομπότ.
5.3 Χρήση τηλεχειριστηρίων
Κατά τη διάρκεια του γύρου, τα τηλεχειριστήρια τοποθετούνται σε προκαθορισμένη θέση και χρησιμοποιούνται μόνο για διακοπή όταν το ζητήσει ο διαιτητής. Το επίσημο υπέρυθρο τηλεχειριστήριο κρατείται από τον διαιτητή.
5.4 Απαγορευμένα εξαρτήματα
-
Εξαρτήματα που παρεμβάλλονται στη λειτουργία του αντιπάλου (π.χ. φακοί, IR LEDs κορεσμού αισθητήρων).
-
Εξαρτήματα που μπορεί να χαράξουν την επιφάνεια του Dohyo (εξαίρεση: σύγκρουση ρομπότ).
-
Εξαρτήματα σχεδιασμένα να καταστρέψουν τον αντίπαλο.
-
Υγρά, σκόνες ή αέρια ως όπλο.
-
Εύφλεκτα υλικά.
-
Συσκευές ρίψης (π.χ. δίχτυ).
-
Μηχανισμοί στερέωσης στο Dohyo (π.χ. κόλλες, βεντούζες, ανεμιστήρες αναρρόφησης κ.λπ.).
6 Αρχές αγώνα
-
Ο αγώνας περιλαμβάνει τρεις γύρους και διαρκεί έως τρία λεπτά. Η ομάδα που θα κερδίσει δύο πόντους Yuko (αποτελεσματικούς) πρώτη, είναι η νικήτρια. Ο χρόνος αγώνα μετράται μόνο κατά τη διάρκεια των γύρων.
-
Αν στο τέλος υπάρχει μόνο ένας πόντος Yuko, νικά η ομάδα που τον κέρδισε.
-
Αν καμία ομάδα δεν κερδίσει γύρο, εφαρμόζεται κατάσταση Yusei (κυριαρχία). Αν δεν μπορεί να αποφασιστεί, ο χρόνος επεκτείνεται κατά τρία λεπτά· όποια ομάδα κερδίσει Yuko σε αυτόν τον χρόνο, νικά.
-
Οι διαγωνιζόμενοι διαθέτουν έως 30 δευτερόλεπτα μεταξύ των γύρων για συντήρηση του ρομπότ.
7 Διοργάνωση του διαγωνισμού
7.1 Απαιτήσεις ασφαλείας
Πίνακας 6 – Μέσα προστασίας
Κατηγορία Γάντια Γυαλιά
Mini Sumo απαιτούνται δεν απαιτούνται
7.2 Έναρξη του αγώνα
Ο αγώνας αρχίζει με σήμα του διαιτητή. Οι διαγωνιζόμενοι υποκλίνονται και τοποθετούν τα ρομπότ τους ταυτόχρονα στο Dohyo σε αντιδιαμετρικούς τομείς, με μέρος του ρομπότ πάνω στη λευκή γραμμή. Τα ρομπότ δεν επιτρέπεται να μετακινηθούν μετά την τοποθέτηση.
Πίνακας 7 – Μέθοδος εκκίνησης
Κατηγορία Μέθοδος
Mini Sumo Οι συμμετέχοντες αποχωρούν από το Dohyo Jyonai. Ο διαιτητής στέλνει σήμα εκκίνησης μέσω επίσημου υπέρυθρου τηλεχειριστηρίου. Τα ρομπότ αρχίζουν να κινούνται μόλις λάβουν το σήμα. Εάν το Dohyo χαραχθεί ή λερωθεί, οι κριτές αποφασίζουν αν θα συνεχιστεί ο αγώνας στο ίδιο ή σε νέο Dohyo.
7.3 Λήξη του αγώνα
-
Ο διαιτητής δίνει σήμα λήξης και σταματά τα ρομπότ.
Πίνακας 8 – Μέθοδος διακοπής
Κατηγορία Μέθοδος
Mini Sumo Ο διαιτητής στέλνει σήμα διακοπής μέσω υπέρυθρου τηλεχειριστηρίου. Οι χειριστές μπορούν επίσης να σταματήσουν το ρομπότ.
2. Μετά το σήμα λήξης, οι συμμετέχοντες απομακρύνουν τα ρομπότ, υποκλίνονται και αποχωρούν από το Dohyo Jyonai.
7.4 Torinaoshi (επανάληψη γύρου)
Ο γύρος επαναλαμβάνεται αν:
-
Τα ρομπότ μπλοκάρουν ή δεν κινούνται.
-
Και τα δύο πέσουν ταυτόχρονα έξω.
-
Δεν μπορεί να καθοριστεί νικητής.
-
Εάν μετά την επανάληψη δεν υπάρχει νικητής, ο διαιτητής δύναται να τοποθετήσει ο ίδιος τα ρομπότ.
7.5 Διαχείριση ρομπότ μεταξύ αγώνων
Τα ρομπότ φυλάσσονται σε καθορισμένο τραπέζι και απομακρύνονται μόνο για τον αγώνα. Απαγορεύεται να φύγουν από την περιοχή χωρίς άδεια και να τροποποιηθούν κατά τη διάρκεια του υπο‑ομίλου.
Σημ.: Αν λείπει το ρομπότ ή η ομάδα όταν κληθεί, ο αγώνας θεωρείται ήττα.
8 Πόντος Yuko, Shinitai και Yusei
8.1 Πόντος Yuko (αποτελεσματικός)
Καταλογίζεται όταν:
-
Ο αντίπαλος ωθηθεί έξω από το Dohyo.
-
Ο αντίπαλος πέσει έξω από το Dohyo.
-
Υπάρξει κατάσταση Shinitai.
-
Υπάρξει κατάσταση Yusei.
-
Ο αντίπαλος λάβει δύο Keikoku (προειδοποιήσεις).
-
Υπάρξει Hansoku (παράβαση).
-
Νίκη χωρίς αγώνα → 2 Yuko (ή 1 επιπλέον αν είχε ήδη).
8.2 Shinitai
Κατάσταση όπου ένας ή περισσότεροι τροχοί βγαίνουν εκτός Dohyo και το ρομπότ δεν μπορεί να επιστρέψει. Ο αντίπαλος κερδίζει 1 Yuko.
8.3 Yusei (κυριαρχία)
Ο διαιτητής μπορεί να απονείμει 1 Yuko βάσει στρατηγικής, κίνησης και δεξιοτήτων.
9 Hansoku (παράβαση) και ποινές
9.1 Keikoku (προειδοποίηση)
Δύο Keikoku → ο αντίπαλος κερδίζει 1 Yuko. Δίνονται όταν:
-
Ο χειριστής ή αντικείμενό του εισέλθει στο Dohyo Jyonai πριν το σήμα λήξης.
-
Το ρομπότ κινηθεί πριν την έναρξη.
-
Παραβίαση κανόνων τηλεχειριστηρίου.
-
Μετακίνηση ρομπότ μετά την τοποθέτηση.
-
Μη συμμόρφωση με μέτρα ασφαλείας.
-
Οποιαδήποτε άλλη άδικη ενέργεια.
9.2 Hansoku (παράβαση)
Ο αντίπαλος (ή και οι δύο) κερδίζει 1 Yuko όταν:
-
Αποκολληθούν μέρη > 5 g.
-
Το ρομπότ δεν κινείται.
-
Και τα δύο κινούνται αλλά δεν συγκρούονται.
-
Το ρομπότ πάρει φωτιά ή φαίνεται να παίρνει.
-
Ο συμμετέχων ζητήσει λήξη.
9.3 Hansokumake (ήττα λόγω παράβασης)
Χάνει ο συμμετέχων που:
-
Δεν παρουσιαστεί ή υπερβεί τον χρόνο συντήρησης.
-
Σαμποτάρει τον αγώνα (π.χ. καταστροφή Dohyo).
-
Παραβιάσει τις απαιτήσεις της §5 ή δεν έχει αυτονομία.
-
Δεν συμμορφωθεί με §7.1 μετά από Keikoku.
9.4 Sikkaku (αποκλεισμός)
Αποκλείεται ο συμμετέχων που:
-
Το ρομπότ του δεν συμμορφώνεται με τη §5.
-
Συμπεριφέρεται απρεπώς (βωμολοχεί, προσβάλλει).
-
Τραυματίζει σκόπιμα τον αντίπαλο.
10 Αναστολή αγώνα
-
Σε τραυματισμό, ο παίκτης μπορεί να ζητήσει αναστολή.
-
Οι κριτές φροντίζουν για άμεση συνέχιση.
-
Αν δεν καταστεί δυνατό, ο αντίπαλος νικά χωρίς αγώνα.
11 Ενστάσεις
Οι αποφάσεις των κριτών δεν υπόκεινται σε έφεση. Παράπονα υποβάλλονται κατά τη διάρκεια ή αμέσως μετά τον αγώνα. Αν δεν υπάρξει λύση, υποβάλλονται άμεσα στον Head Referee. Καθυστερημένες ενστάσεις απορρίπτονται. Αγενής συμπεριφορά μπορεί να οδηγήσει σε αποκλεισμό από τον Head Referee ή/και τους διοργανωτές.
12 Σήμανση ρομπότ
12.1 Σήματα στο ρομπότ
Τα ρομπότ πρέπει να φέρουν αυτοκόλλητα αριθμού που παρέχουν οι διοργανωτές. Το αυτοκόλλητο δεν τοποθετείται στην λεπίδα ούτε σε σημείο που παρεμποδίζει τους αισθητήρες του αντιπάλου
13 Αλλαγές και ακυρώσεις κανόνων
Οι αλλαγές/ακυρώσεις εγκρίνονται από τον κύριο διοργανωτή σύμφωνα με τον κανονισμό της επιτροπής.
14 Διοργάνωση
Ο αγωνιστικός χώρος έχει ανομοιόμορφο φωτισμό και υπέρυθρο θόρυβο· συνιστάται χρήση καλυμμάτων αισθητήρων και δοκιμές υπό έντονο φως ή άμεσο ηλιακό φως.
15 Παράρτημα 1 – Σχήμα αγωνιστικού χώρου
Σχήμα 2 – Περιοχή αγώνα
16 Παράρτημα 2 – Σύστημα εκκίνησης και στοπ
Το ίδιο σύστημα JSumo MicroStart Start Module χρησιμοποιείται όπως στους MRC Global Robot Olympiad, Robolympics και IEEE Robowars. Στόχος: δίκαιη και γρήγορη εκκίνηση.
Βασίζεται σε ψηφιακό υπέρυθρο τηλεχειριστήριο (38 kHz, πρωτόκολλο Sony SIRC) και δέκτη επάνω στα ρομπότ.
Το Start Module διαθέτει 2 LED:
• ΚΟΚΚΙΝΟ: σήμα stop
• ΜΠΛΕ: σήμα start
Ρύθμιση συστήματος
• START SIGNAL: έξοδος 0 V → 5 V (λογ. 1)
• STOP SIGNAL: έξοδος 5 V → 0 V (λογ. 0)
Η λειτουργία δοκιμάζεται στον τεχνικό έλεγχο.
Περισσότερα: https://www.jsumo.com/microstart-sumo-minisumo-robot-start-module
Datasheet: https://jsumo.com/Data/EditorFiles/additional/microstart-eng.pdf
Βίντεο: https://www.youtube.com/watch?v=J1liSEkVleA
Θήκη 3D (“Microstart Case”): https://www.jsumo.com/3d
17 Ιστορικό αναθεωρήσεων
-
15.06.2024 Αφαιρέθηκε προγενέστερο ιστορικό αλλαγών πριν το 2020
-
15.06.2024 §11 – Προστέθηκε δυνατότητα αποκλεισμού για αγενή συμπεριφορά
-
15.06.2024 §15 (Παράρτημα 2) – Προστέθηκε νέα περιγραφή για το Start Module
-
15.06.2024 §12.1 – Διευκρίνιση σήμανσης ρομπότ
-
15.06.2024 §5.4, σημείο 7 – Προστέθηκε παράδειγμα και απαγορεύτηκαν ανεμιστήρες αναρρόφησης
-
15.06.2024 Εκκαθαρίστηκαν η διάταξη και μορφή εγγράφου
-
15.06.2024 Αφαιρέθηκε κατηγορία Micro Sumo
-
29.08.2024 Προστέθηκε νέο §14 «Διοργάνωση»
_edited.jpg)
_edited.jpg)